Hallo zusammen,
ich melde mich dann auch nochmal zurück-
Zu den Dip-Schaltern kann ich nicht viel sagen, ohne sie aufzuschrauben, aber dazu sollte sich im Netz und der Doku etwas finden lassen - wichtig könnte sein, die Wallbox nochmal stromlos zu nehmen, nachdem man etwas geändert hat (falls man sie überhaupt mit Strom drauf aufmacht).
Ich habe EVCC bei mir mittlerweile wieder komplett deaktiviert, weil es für mich keinen wirklichen Nutzen hat.
Was ich mit meinen lokalen Regeln nutzen kann, um den Ladevorgang zu steuern (teilweise fest in der Automation eingetragen):
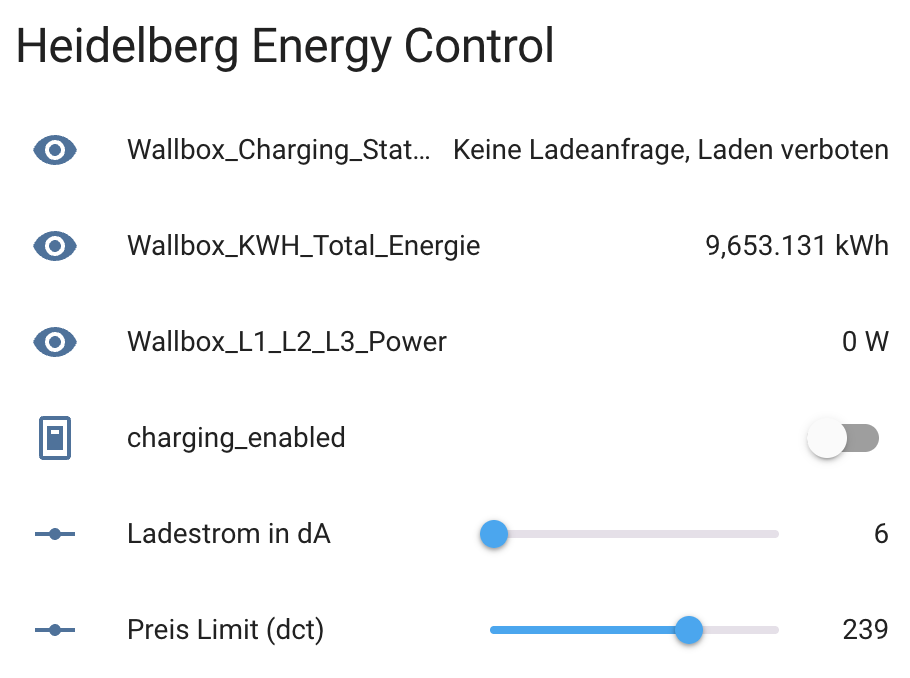
- Preisgrenze, unterhalb der geladen wird
- Dass während den günstigsten Stunden des Tages geladen wird
- Dass unter 17% SoC immer geladen wird, um die Akku-Alterung einzugrenzen
- Wenn das Auto vorklimatisiert soll geladen werden
- Ladestrom, mit dem geladen wird (um über längere Zeit anteilig viel über Balkonsolar zu laden)
Folgende Komponenten in HA nutze ich mittlerweile:
configuration.yaml
input_number:
charging_amps:
name: charging_amps
min: 6
max: 16
step: 1
mode: slider
charging_price_limit:
name: charging_price_limit
min: -10
max: 350
step: 1
input_boolean:
charging_enabled:
name: charging_enabled
icon: mdi:light-switch
modbus:
- name: heidelberg_wallbox
type: serial
method: rtu
port: /dev/serial/by-id/usb-1a86_USB_Serial-if00-port0 # Path to your RS485 adapter
baudrate: 19200
stopbits: 1
bytesize: 8
parity: E
delay: 0
message_wait_milliseconds: 30
timeout: 5
sensors:
# Read the raw charging status
- name: Wallbox_Charging_Status_Raw
address: 5 # Register for charging status
input_type: input
data_type: uint16
# Read the power of L1, L2, and L3 combined (in watts)
- name: Wallbox_L1_L2_L3_Power
address: 14 # Register for L1 L2 L3 Power
input_type: input
unit_of_measurement: W
data_type: uint16
precision: 0 # No decimals
# Read the total energy consumption (in kWh)
- name: Wallbox_KWH_Total_Energie
address: 17 # Register for total energy
input_type: input
unit_of_measurement: kWh
data_type: uint32
scale: 0.001 # Multiply by 0.001 to convert to kWh
precision: 3 # 3 decimal places
automation Enable Wallbox
alias: Enable Wallbox
description: ""
triggers:
- minutes: /5
trigger: time_pattern
- minutes: "1"
trigger: time_pattern
conditions: []
actions:
- choose:
- conditions:
- condition: or
conditions:
- condition: template
value_template: >
{% set avg_price =
state_attr('sensor.strompreis',
'avg_price') | float %} {% set min_price =
state_attr('sensor.strompreis',
'min_price') | float %} {% set threshold = ( 2 * avg_price
+ 4 * min_price) / 6 %} {{
states('sensor.strompreis') |
float < threshold }}
- condition: template
value_template: >
{{ states('sensor.strompreis') |
float <= ((states('input_number.charging_price_limit') | float
/ 1000) ) }}
enabled: true
- type: is_battery_level
condition: device
device_id: cf1f4b4010e3c3f9xxx
entity_id: 51dcc69e590362ff3xxx
domain: sensor
below: 17
- condition: state
entity_id: switch.ms_apollo_electric_climatisation
state: "on"
sequence:
- action: input_boolean.turn_on
target:
entity_id: input_boolean.charging_enabled
data: {}
default:
- action: input_boolean.turn_off
metadata: {}
data: {}
target:
entity_id: input_boolean.charging_enabled
mode: single
Automation Update Charging Current
alias: Update Charging Current
description: ""
triggers:
- entity_id: input_number.charging_amps
trigger: state
- trigger: state
entity_id:
- input_boolean.charging_enabled
to: null
conditions: []
actions:
- choose:
- conditions:
- condition: state
entity_id: input_boolean.charging_enabled
state: "on"
sequence:
- action: script.set_charging_current
metadata: {}
data: {}
default:
- action: script.disable_charging_current
metadata: {}
data: {}
Script set_charging_current
sequence:
- data:
hub: heidelberg_wallbox
unit: 1
address: 261
value: "{{ states('input_number.charging_amps') | int * 10 }}"
action: modbus.write_register
alias: Set Charging Current
description: ""
Script disable_charging_current
sequence:
- data:
hub: heidelberg_wallbox
unit: 1
address: 261
value: 0
action: modbus.write_register
alias: Disable charging current
description: ""
Vielleicht nützt es ja jemandem.
Viele Grüße
manuskript