Hallo und frohes Neues!
Ich habe jetzt über eine Woche damit verbracht, den Heimassistenten einzurichten (Umzug von Tuya), 64 Geräte über Zigbee2MQTT, davon sind 33 Router, alles auf Raspberry PI 5 mit 8GB und Sonoff Dongle-E. Nach ein paar Stolpersteinen und dem letzten Feinschliff läuft jetzt alles bestens und genau so, wie ich es mir wünsche, nur an einer Sache beiße ich mir die Zähne aus:
Ich habe 3 Rollos mit Zigbee-Perlschnurantrieben, einer von MOES und 2 von einer anderen Firma, aber alle bau- und funktionsgleich. (AM43-0.45-40-ES-EB)
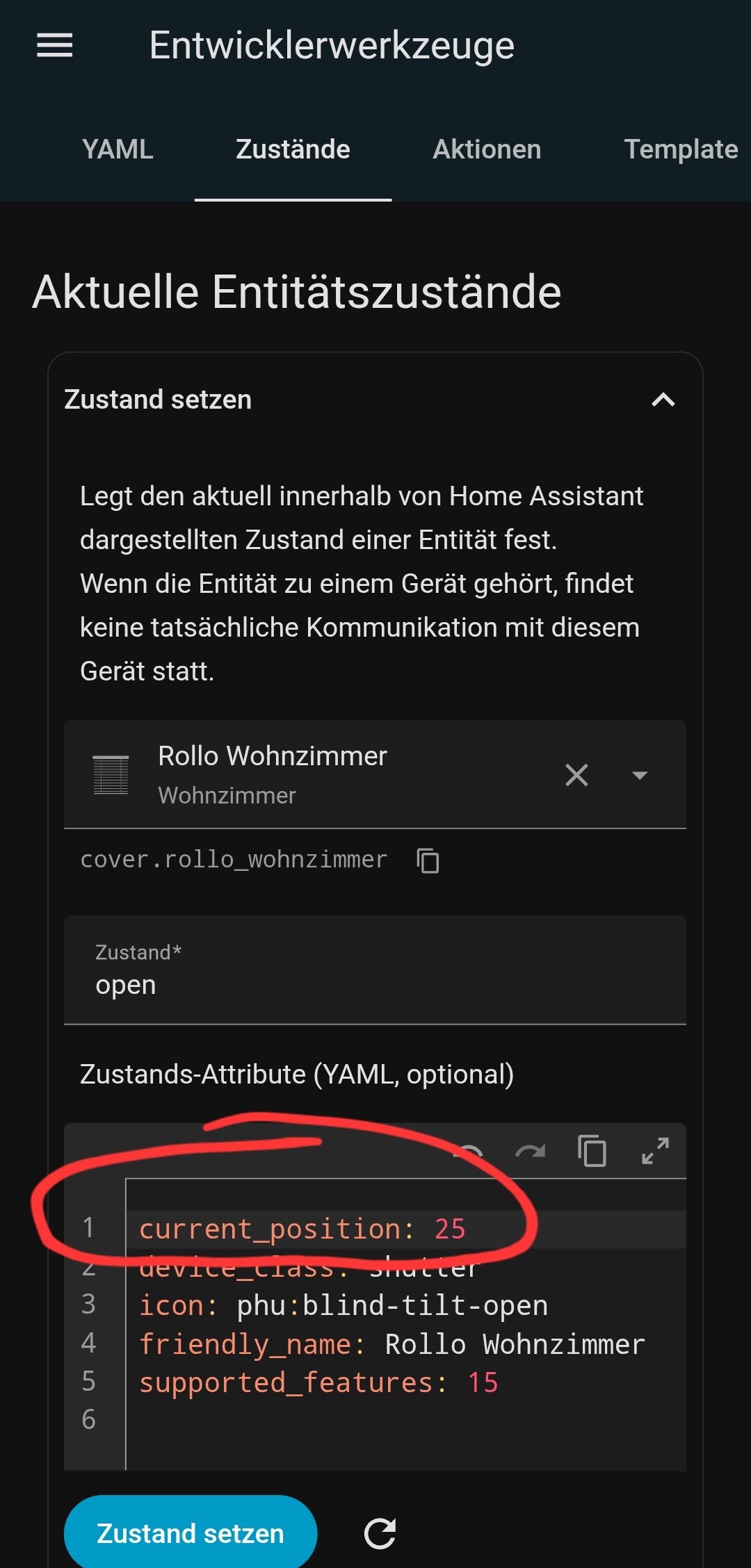
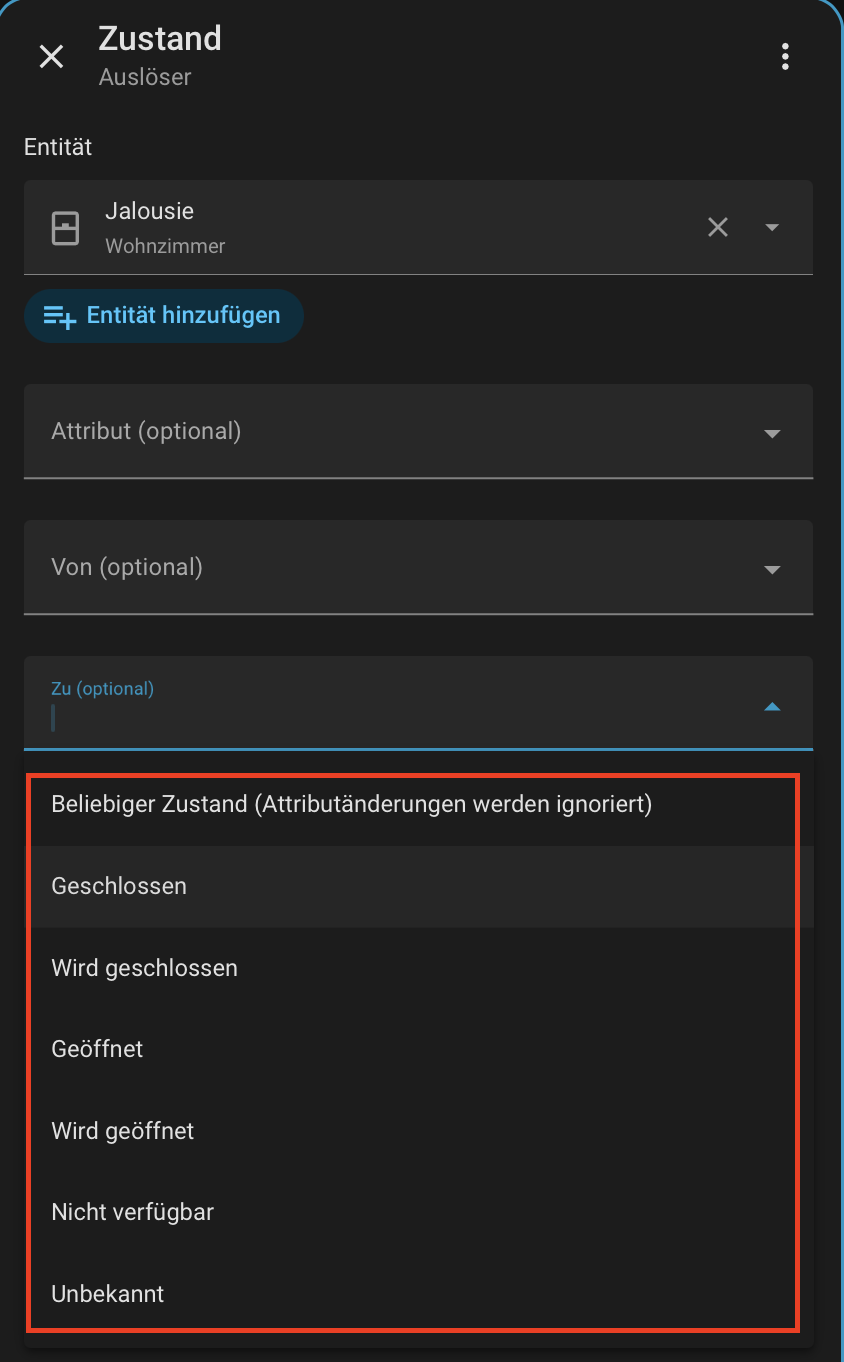
Wenn ein Rollo komplett geöffnet oder geschlossen wurde, lasse ich mir per Automation eine Benachrichtigung zukommen, nur leider werden diese Benachrichtigungen bereits ausgelöst, wenn ein Rollo anläuft und nicht, wenn es den finalen Zustand erreicht. Ich habe alle möglichen Kombinationen für jeweils Schließ-, Öffnungs- und Benachrichtigensautomationen probiert, über Gerät, Abdeckung, Entität, Zustand/Nummerischer Zustand, immer das gleiche Ergebnis, auch im Dashboard wird bereits die Endposition angezeigt, während das Rollo noch läuft. Ist es nicht möglich, die Benachrichtigung erst bei erreichtem Zustand auszulösen, ist es geräteabhängig oder übersehe ich etwas? Unter Tuya hat das bestens funktioniert, Zielposition nicht erreicht, gabs auch keine Benachrichtigung oder umgekehrt.
Hier mal die YAML-Codes
Schließautomation:
alias: SU WZ-Rollos ZU
description: ""
triggers:
- trigger: sun
event: sunset
offset: 0
conditions: []
actions:
- action: automation.trigger
metadata: {}
target:
entity_id:
- automation.zu_wz_rollo_r_ohne_ausloser
data:
skip_condition: false
- action: scene.turn_on
metadata: {}
target:
entity_id: scene.zu_wz_rollo_l
data: {}
mode: single
Eingesetzte Schließszenen für jeweils Links und Rechts:
id: "1767536711976"
name: ZU WZ-Rollo-L
entities:
cover.wz_rollo_l:
current_position: 0
friendly_name: WZ-Rollo-L
supported_features: 15
state: closed
icon: mdi:roller-shade-closed
metadata:
cover.wz_rollo_l:
entity_only: true
id: "1767536797361"
name: ZU WZ-Rollo-R
entities:
cover.wz_rollo_r:
current_position: 0
friendly_name: WZ-Rollo-R
supported_features: 15
state: closed
icon: mdi:roller-shade-closed
metadata:
cover.wz_rollo_r:
entity_only: true
Benachrichtigungsautomation:
alias: 🌘WZ-Rollo-R ZU
description: ""
triggers:
- trigger: numeric_state
entity_id:
- cover.wz_rollo_r
below: 1
conditions: []
actions:
- action: notify.alle_geraete
metadata: {}
data:
message: >-
{{ now().strftime('%H:%M') }} Uhr, {% set weekdays = ['Sonntag',
'Montag', 'Dienstag', 'Mittwoch', 'Donnerstag', 'Freitag', 'Samstag'] %}
{{ weekdays[(now().weekday() + 1) % 7] }}, {{ now().strftime('%d.%m.%Y')
}}
title: "{{ this.attributes.friendly_name }}"
mode: single