Hallo. Ich (dank Simons Video) bereits meinen Roborock S5 in HA mit Karte etc. eingebunden. Nun habe ich im OG noch einen Xiaomi Sauger der ersten Generation. Dieser ist per Xiaomi Home App in meinem Netzwerk intergriert und kann über die App gestartet etc. werden. Ich würde diesen nun auch gerne in HA intergrieren und auf ein Dashboard legen. Zudem würde ich gerne die Karte nutzen, die er aufzeichnet. sofern das irgendwie geht. Denn er löscht die ja immer wieder. Ich hatte aus den ioBroker Zeit noch was im Kopf, dass man mit einer App oder Tool die Raumpunkte der Räume auf der Karte ermitteln konnte und dann per Script Befehl an den Saugern senden kann, so dass man so auch eine Raumreinigen hinbekommen hat. Aber das ist lange her. Ggf. gibt es ja HEUTE eine einfacherer Methode um diese Sauger zu intergieren und die Räume des Geschossen entsprechend zu definieren. Danke vorab.
PS: Habe unter HACS die Integration Xiaomi Cloud Map Extractor gefunden. Das wird der Sauger unterstützt. Hat mittels diesen Weges jemand eine Anleitung oder eien YT Video etc?
welches Model ist es genau? Haben meinen S5 https://valetudo.cloud/ verpasst. Vielleicht ist dein Modell ja kompatibel. Dann bist du unabhängig von der Cloud und kannst diesen per Mqtt steuern.
Hi, auch wenn es nicht wirklich mit dem Thread zu tun hat. Ich habe auf meinen S5 auch mit Valetudo versehen. Nur bekomme ich einfach keine Zonen in HA. Hast du da einen Tipp?
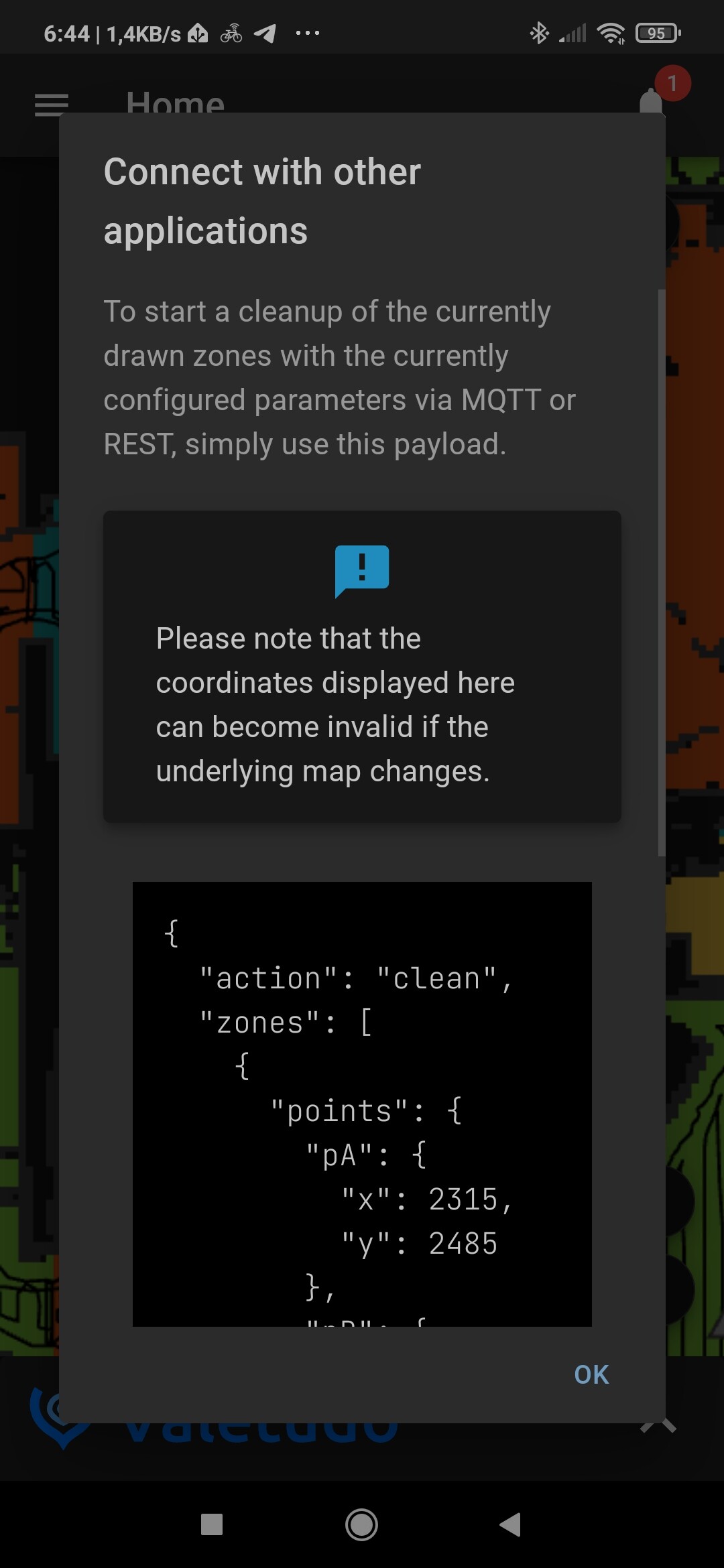
Natürlich. Ich nutze packages in HA und habe mir daher eine yaml komplett nur für den Robo gebaut. Dort habe ich für die Zone einfach einen Button eingerichtet. Wird dieser gedrückt die Zone gereinigt.